

Competitions
Competitions






#25 Chain Tensioner - QTY 1
This turnbuckle chain tensioner integrates directly with #25 chain. Using a chain tool, the custom 1/4-20 link bolts replace a chain link and have the pin pushed back through it to become part of the chain. Then simply twist the center coupler to tighten or loosen the chain and tighten the jam nuts once your chain tension is perfect.
All parts are made of steel including the coupler and the custom chain link bolts are 1/4-20 thread for increased strength. One link bolt is left hand threaded and the other is right hand threaded, so take care not to mix them up if purchasing multiple sets.
Material: Steel, all of it.

38mm Omni Wheel
The 38mm Omni Wheel was designed as an odometry wheel that can fit inside most channel sizes. For ease of use, three cores were designed to fit 6mm D-Shaft, 5mm Hex Shaft, and 7mm Hex Shaft. The wheel is open for easy use in any ecosystem with the provided different-sized cores.
Specifications:
- Diameter: 38mm
- Number of rollers: 8
- Body Material: Delrin
- Roller Material: TPE/TPU 80A
- Max Load: 2kg
- Weight:
Includes,
- 38mm Omni wheel
- 38mm 6mm D-Shaft Hub, pre-installed
- 38mm 5mm Hex Shaft Hub
- 38mm 7mm Hex Shaft
")
Omni Wheel (100mm, Double Plastic, w/ integrated 6mm Hub)
The 100mm (4 inch) Double Plastic Omni Wheel provides rotational and sideways 360° maneuverability. Great for omni directional movement and rotation, easy direction control and tracking, and for fast turning,
Specifications:
- Diameter: 100mm (4")
- Axial width: 16mm
- Hub: 6mm (included)
- Number of plate: 2
- Number of roller: 18
- Body material: Nylon
- Roller material: Rubber
- Roller diameter: 19mm
- Net weight: 275g
- Load capacity: 20kg
- Step File

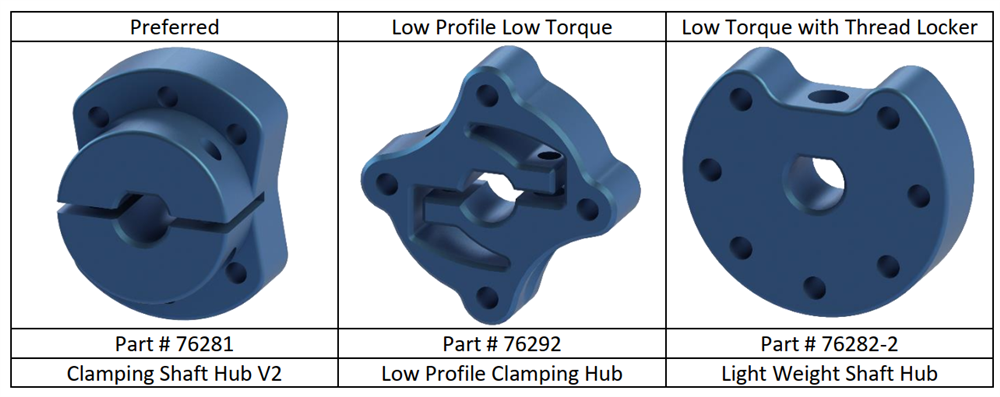
6mm D Shaft Low Profile Clamping Hub
Φ29.0mm*16.0mm thick
6*M3 thread tapping through
(including 2*M3 thread for M3 SHCS)
Φ6.0mm D hole
AL6061-T6

Clamping Shaft Hub - v2
Made of aluminum, the Studica Clamping Shaft Hub is used with flex and drive wheels
Specifcation:
- Material: 6061-T6 Aluminum
- 6mm ID
- Hole pattern for connecting to structure
- Step File

Radial 35mm x 47mm x 7mm Bearing - QTY 2
These bearing options are perfect for supporting spline shafts. The bearings slide on easily in our testing.
Flanged version: 35mm ID x 47mm OD x 7mm overall width - 1.5mm thick flange - .070 lbs
Radial version: 35mm ID x 47mm OD x 7mm overall width - .065 lbs
Comes in both radial and flanged versions.

100mm Slim Mecanum Wheel Set (Bearing Rollers, 2 left, 2 right)
The 100mm Slim Mecanum Wheel Set comes with 2 left and 2 right, and steel ball bearings. With blue steel frame and black rollers. The wheel is comprised of 12 black rollers and is able to move in any direction. Rollers are set at 45° to the axis of rotation of the wheel.
Rollers are mounted with steel ball bearings, making the roll more fluent.
Wheel Specifications:
- Diameter: 100mm
- Width: 38m
- Number of Rollers: 12
- Number of Plates for each wheel: 2
- Body material: Steel
- Roller material: Polyethylene (PE) and Polypropylene (PP)
- Spacer Material: Delrin
The following hubs (purchased seperately) will work with these wheels

Clamping Shaft Hub
Made of aluminum, the Studica Clamping Shaft Hub is used with flex and drive wheels
Specifcation:
- Material: 6061-T6 Aluminum
- 6mm ID
- Hole pattern for connecting to structure
- Step File

iCrimp Mini Micro Open Barrel Crimper
IWS-2820M open barrel crimper tool is designed to crimp non-insulated open barrel, OEM-style terminals. Perfect for servo lead connectors and some other RC crimp connectors.

navX2-Micro Robotics Navigation Sensor
The navX2-Micro is the greatest sensor for orientation in competitive robots. nnavX2-Micro is a second-generation 9-axis inertial/magnetic sensor and motion processor. Designed for plug-n-play installation onto robots such as those used in the WorldSkills Robotics, FIRST Technology Challenge (FTC) and the FIRST Robotics Challenge (FRC), navX2-Micro helps build better robots by adding sophisticated navigation capabilities. Significant improvements over the classic navX2-Micro allow for more accuracy, decreased yaw drift, and faster boot time. navX2-Micro includes software algorithms for enhanced sensor calibration as well as KalmanFilter-based data fusion combining gyro, accelerometer, and magnetometer data into a 9-axis heading and high-quality magnetometer calibration including magnetic disturbance detection.
In addition to being an Inertial Measurement Unit, navX2-Micro capabilities are referred to within the aerospace industry as an “Attitude/Heading Reference System” (AHRS). Studica brings this high-tech AHRS capability to FIRST teams – to use, learn, and explore. navX2-Micro is a key component of Studica’s ongoing efforts to make state-of-the-art navigation technologies used in drones and autonomous vehicles (e.g., the Google Car) available to robotics students and enthusiasts as low-cost, open-source products.
Improvements over navX "Classic":
navX2-Micro features a new set of IMU & Magnetometer sensors with superior sensor specifications to those on the MPU-9250 sensor. This board has a faster 180Mhz microcontroller and an optimized startup time at 5 seconds versus 15 seconds. In addition, it has a completely new Kalman Filter-based Sensor Fusion algorithm running internally at a blazing fast 416Hz.
RoboRIO Installation
It's recommended to connect to the RoboRIO using a USB Mini-B type (Male) to USB A type (Male) connector, navX2-Micro can receive both power and also communicate with the RoboRIO. This preferred installation method allows the navX2-Micro circuit board to be placed up to 6 meters away from the RoboRIO.
IMPORTANT NOTE: To avoid having the navX2-Micro reset due to a RoboRIO brownout, connecting the navX2-Micro to the RoboRIO via USB is highly recommended.


iCrimp Open Barrel Crimper
Purpose: IWS-2412M open barrel crimper tool is designed to crimp non-insulated open barrel, OEM-style terminals. Perfect for servo lead connectors and some other RC crimp connectors.

20 Tooth GT2-6mm Timing Belt Pulley
The 20 Tooth GT2-6mm Timing Belt Pulley can be used with any of the GT2 belts.
Specifications:
- 20 Tooth Timing Pulley
- 6mm Bore
- Material: 6061 T6 Aluminum
- Step File

iCrimp Ferrule Crimping Tool Kit
iCrimp Ferrule Crimping Tool Kit, AWG 23-10 Self-adjustable Ratchet Ferrule Crimper Plier c/w 770End Sleeve Ferrules Connector Terminals
")
GT2 Timing Belt, 2mm Pitch, 6mm width, 1000mm Open, (2 pack)
This GT2 (also called 2GT) timing belt has a 2mm Pitch, 6mm width, and open 1000mm in length. Use any of the GT2 pulleys from Studica and the clamp kit.
Specifications:
- type: GT2 open-loop
- pitch: 2 mm
- width: 6 mm
- material: neoprene rubber, fiberglass reinforced
- belt shape: circular tooth profile
